北航高低无人机协同导航方案无人机在复杂环境中不怕迷失方向了
无人机在复杂环境中不怕迷失方向了,迅速找到目标!
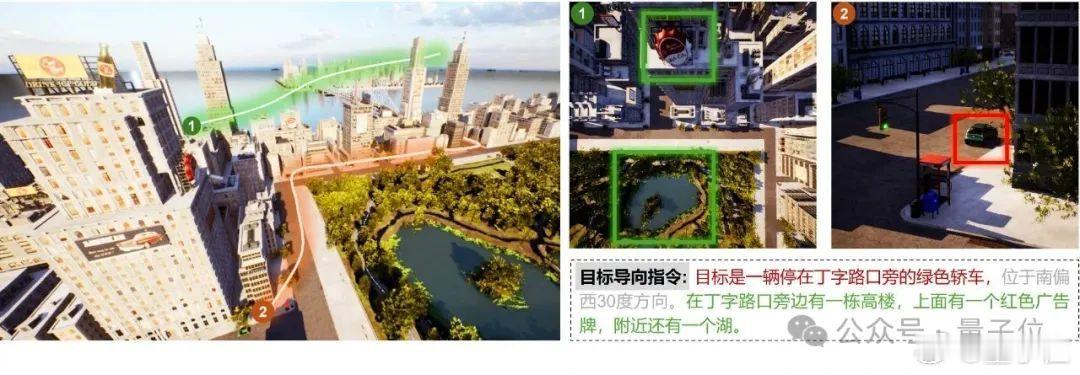
北航刘偲教授团队提出高低无人机协同导航新范式,两台无人机分工配合:高空无人机作为“全景指挥官”,负责全局感知与推理;低空无人机作为“地面侦察员”,执行精细导航与目标搜索,两者协同快速找到目标。
话不多说,来看实例。想让无人机“去湖边指定房子附近找到那辆停在树下的汽车”,单台无人机要么飞得太高,看不到树下的汽车;要么飞得太低,顾不上房子、湖泊这些宏观地标。单台无人机在复杂环境中容易迷失方向,但当高低空无人机协同作战,就能快速找到目标:
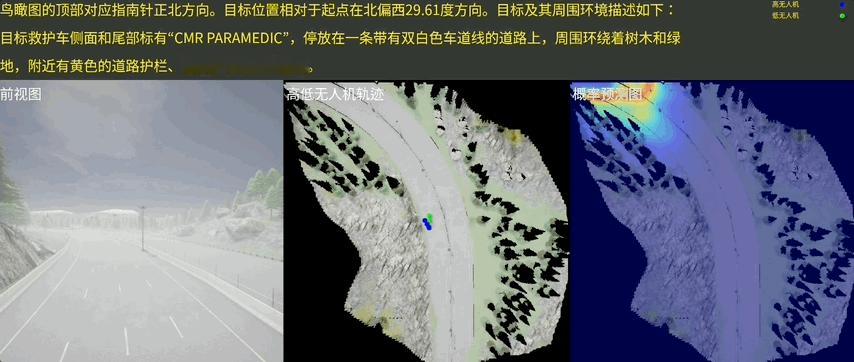
如下三张图分别从“前视图、高低无人机轨迹、概率预测图”角度,展示此方案如何工作:【图1】
像找小狗这样的小型目标,也能快速配合完成定位:【图2】
若目标物标有特定字母、文字描述也可精准匹配:【图3】
依据目标人物周边环境的细节特征,也能完成精准识别:【图4】
为支持该任务,团队基于UAV-Need-Help构建了HaL-13k数据集,并设计了协作框架AeroDuo。他们在Openuav仿真环境对AeroDuo测评,验证了其高低协同在环境覆盖、导航精度与自主性之间的有效平衡。
团队表示,本文研究成果将发表于ACM MM 2025。以下是更多细节。