又看了一遍李想的AI talk,再跟曹旭东对 RL 和 VLA的诠释对照一下,两个人没有本质上的区别。或者说,李想对VLA的定义,超越了VLA学术层面的意义。
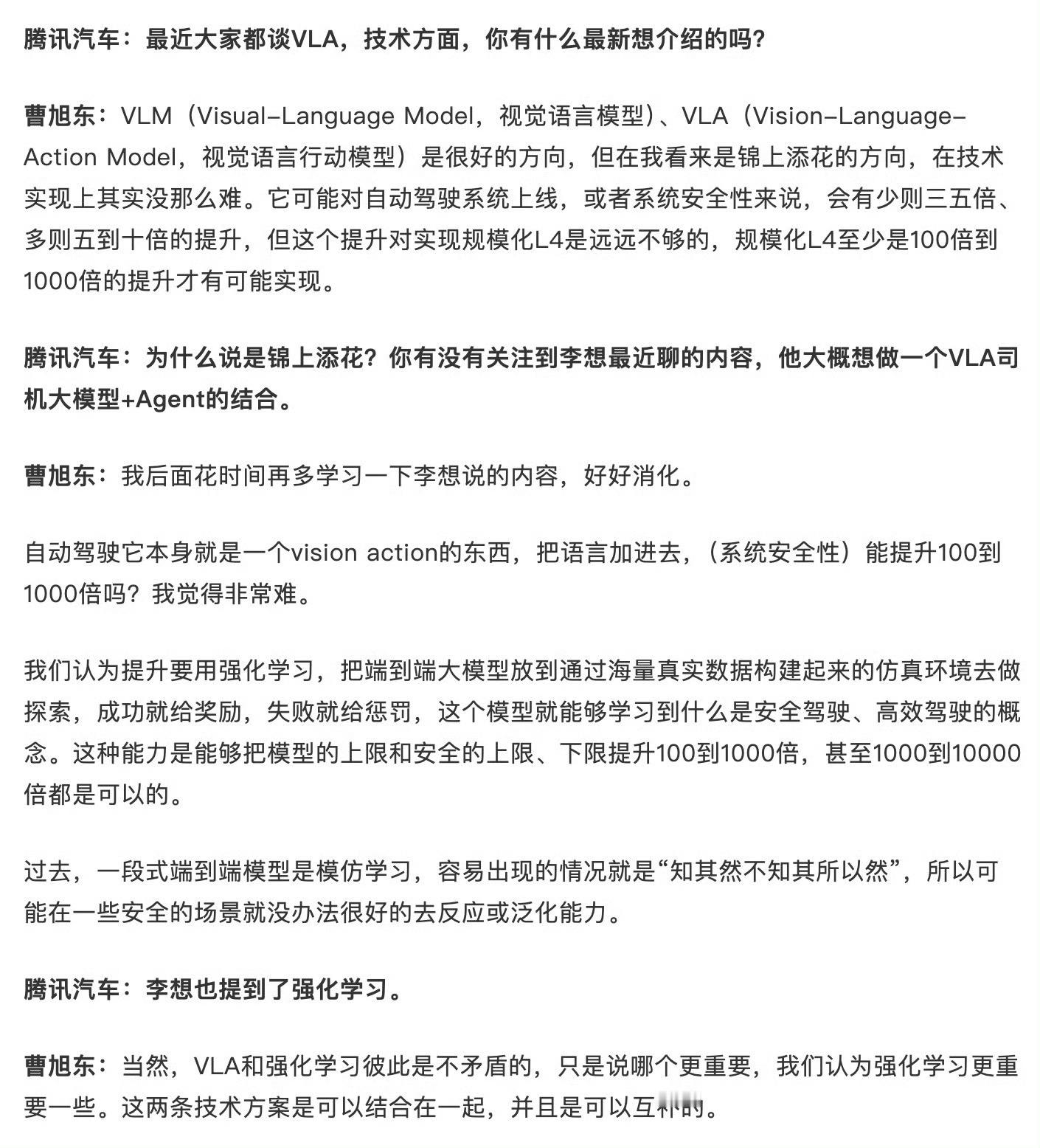
如何打磨辅助驾驶的基础驾驶技术,两人的回答,都是需要通过强化学习的方式,在类似世界模型这样的仿真环境里,海量的「刷题」,模型做的好就奖励,做的不好就惩罚,让辅助驾驶驾驶技术向L4演进。
而VL的部分,是再往上一层的追求。辅助驾驶如何理解潮汐车道、如何理解待行区的使用,如何真的看懂导航等等,这些都需要VL对世界的理解。这也就是曹旭东说的两条技术方案可以结合在一起,可以互补。
但再看一遍AI talk,我发现李想在第三层,也就是产品层,有更深入的思考的。李想不想把辅助驾驶定义为驾驶机器,他的定义是司机agent。区别是,对于「司机」,用户可以向对真人一样,用我们日常对话的方式,告诉辅助驾驶你的想法。VLA,是构建下一代辅助驾驶多模态交互的天然路径。
我们也AI talk同期,看到了相关演示,在比如说,告诉系统“开慢一点儿”、“星巴克门口停车”,甚至给车机发一张照片,让车直接来照片对应的场景接我。都是类似的产品形态应用。
总结起来,在辅助驾驶的技术路线判断上,两人没啥区别;在产品形态的思考上,李想的答案,应该会成为行业里的重要范式。