具身智能融合认知与物理执行,核心是算法、数据、硬件协同。
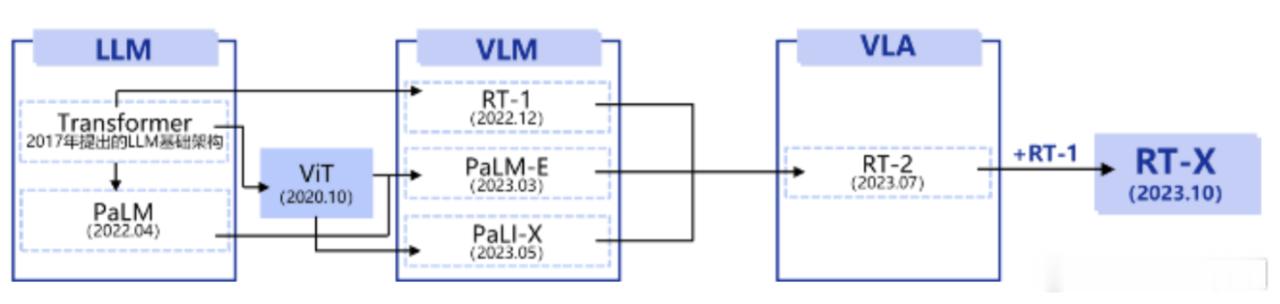
算法分上下层,上层 VLA 模型(如 RT 系列)实现语义到动作映射,但受数据和任务稳定性限制;下层结合经典控制与强化学习(如波士顿动力)。
数据采用真实采集(如动捕)、合成扩展(如 NVIDIA 仿真)、网络补充(如视频预训练)三层体系。
硬件控制器分 “大脑”(如 Jetson 算力芯片)和 “小脑”(如实时控制器),特斯拉等自研整合。整体向算法融合、数据闭环、硬件协同演进。



具身智能融合认知与物理执行,核心是算法、数据、硬件协同。
算法分上下层,上层 VLA 模型(如 RT 系列)实现语义到动作映射,但受数据和任务稳定性限制;下层结合经典控制与强化学习(如波士顿动力)。
数据采用真实采集(如动捕)、合成扩展(如 NVIDIA 仿真)、网络补充(如视频预训练)三层体系。
硬件控制器分 “大脑”(如 Jetson 算力芯片)和 “小脑”(如实时控制器),特斯拉等自研整合。整体向算法融合、数据闭环、硬件协同演进。

作者最新文章
热门分类
汽车TOP
汽车最新文章