昨天小伙伴也是体验了元戎的VLA,跑了跑深圳的晚高峰啊,谈一些感受
有误,喷[doge][doge]
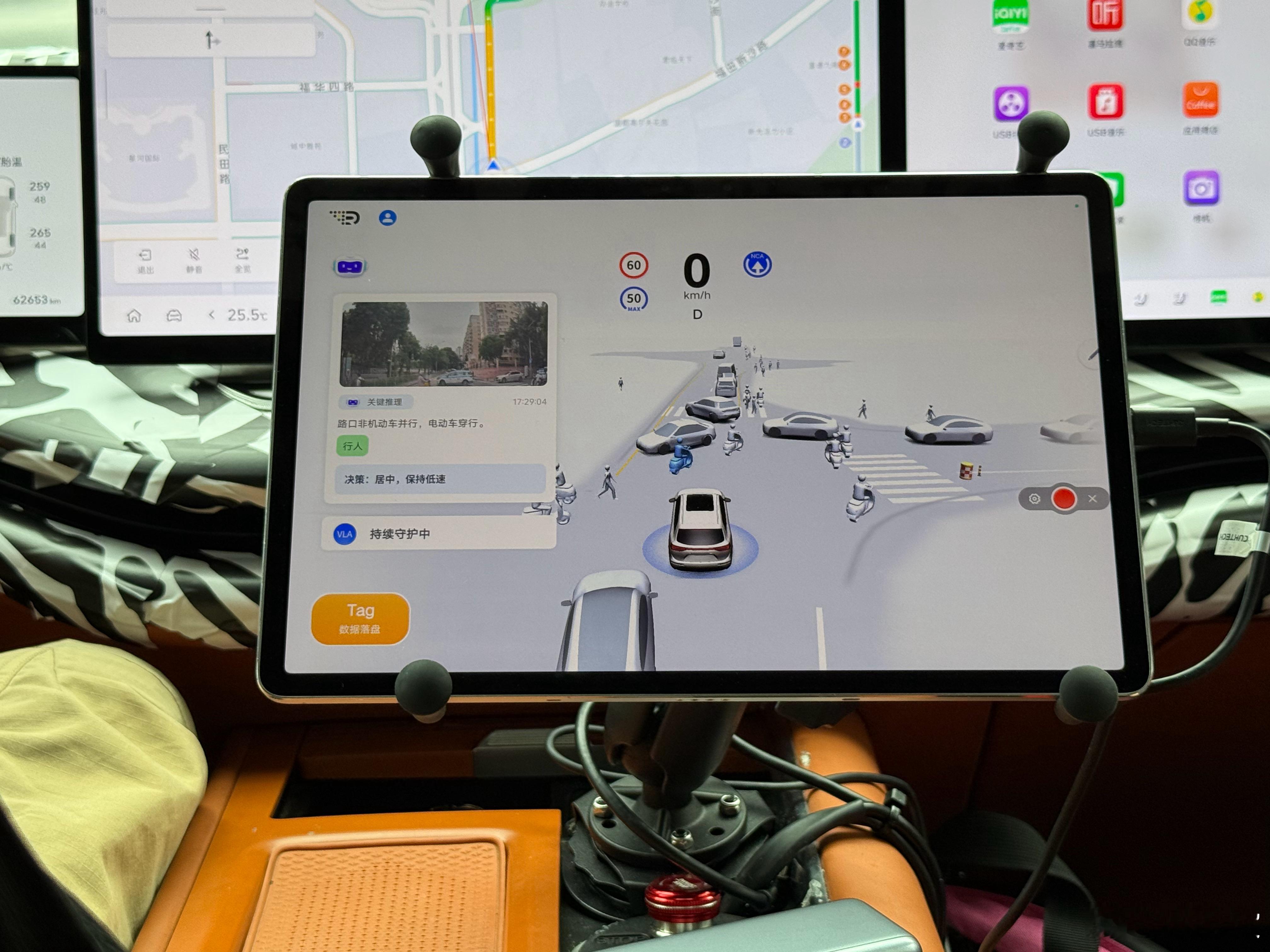
1️⃣相比于之前的版本,新版本的防御性驾驶可谓是一个长足的进步点,现在系统在复杂路段会启动防御性驾驶,将key pionts显示在屏幕上,前向信息的刷新帧率不错,处理速度也很快。并且元戎的VLA还将不同的盲区做了区分(临停车盲区,弯道盲区等等)现在主要是对静态的一些盲区场景,后续会做到动态盲区的识别,例如鬼抬头场景,这个对于情景意识的理解难度真的很高
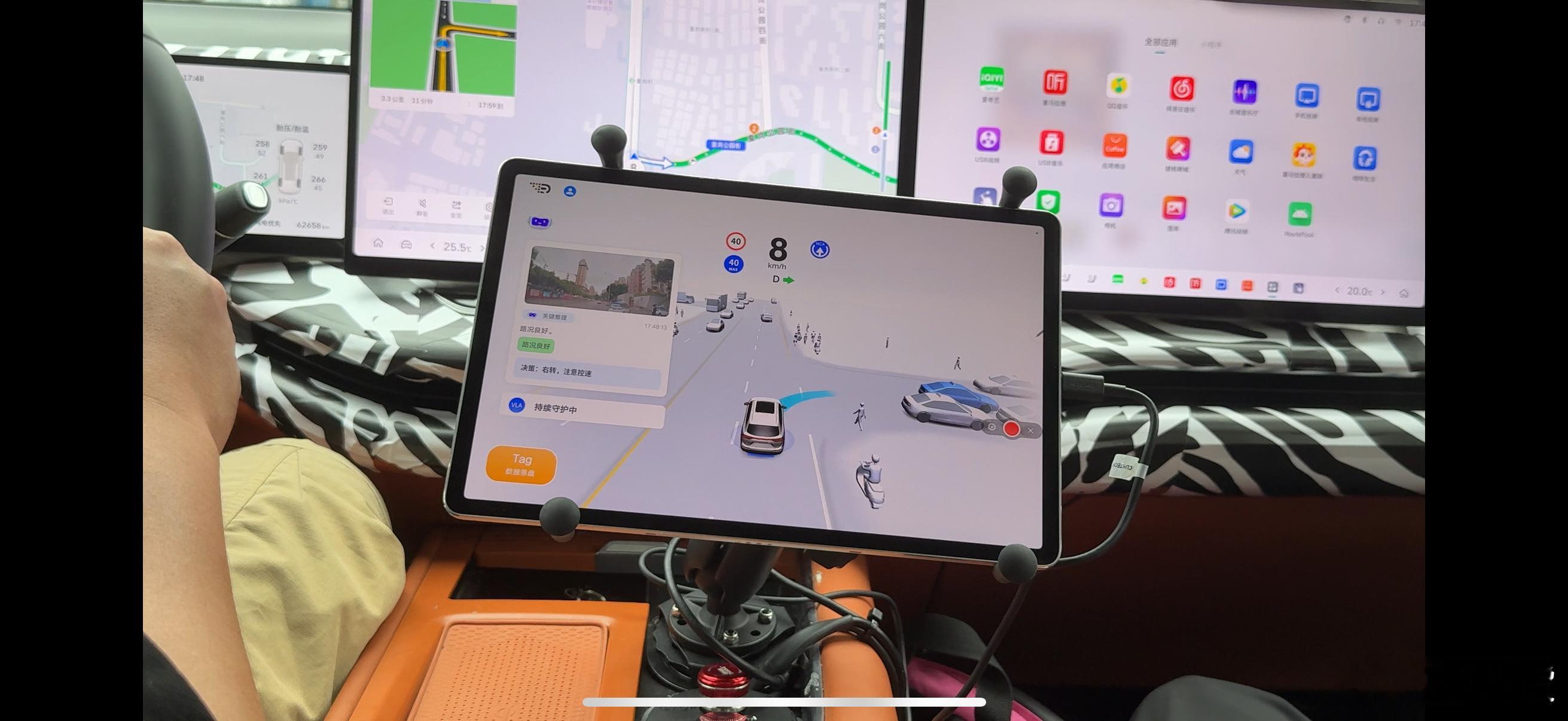
2️⃣元戎的这版VLA时延也非常的低,这样的好处是让系统的决策动作很连贯丝滑,全程没有遇到急刹和大起步的情况,在晚高峰的场景高车流量的情况下通勤效率是可以的
3️⃣深圳这边比较特色的道路结构窄路桥洞,元戎的VLA的减速慢行给予人的安定感非常的足
现在各家的智驾方案已经在做的越来越好了,现在针对的是对于驾驶体感上的区分了,面对复杂场景系统多项决策是否可以连贯执行以及整个纵横向的加减速线性程度是否线性,系统打磨的越来越细腻~
为每一位在智驾行业辛苦耕耘的从业者点赞![加油][加油]
大v聊车