智能泊车,应该是我使用频率最高的一个智驾功能,我并不追求一定要停得有多快多好,就是一种习惯,开到地库了我一键泊车基本就不用管了,该看手机简单回个消息就能回,确实省心不少。
刚好昨天在蔚来发布会上,斌哥公布了「蔚来世界模型 NWM」“牛屋妹”的首个版本将在6月进行推送,「智能泊车」就是一大升级点,简单跟大家聊聊。
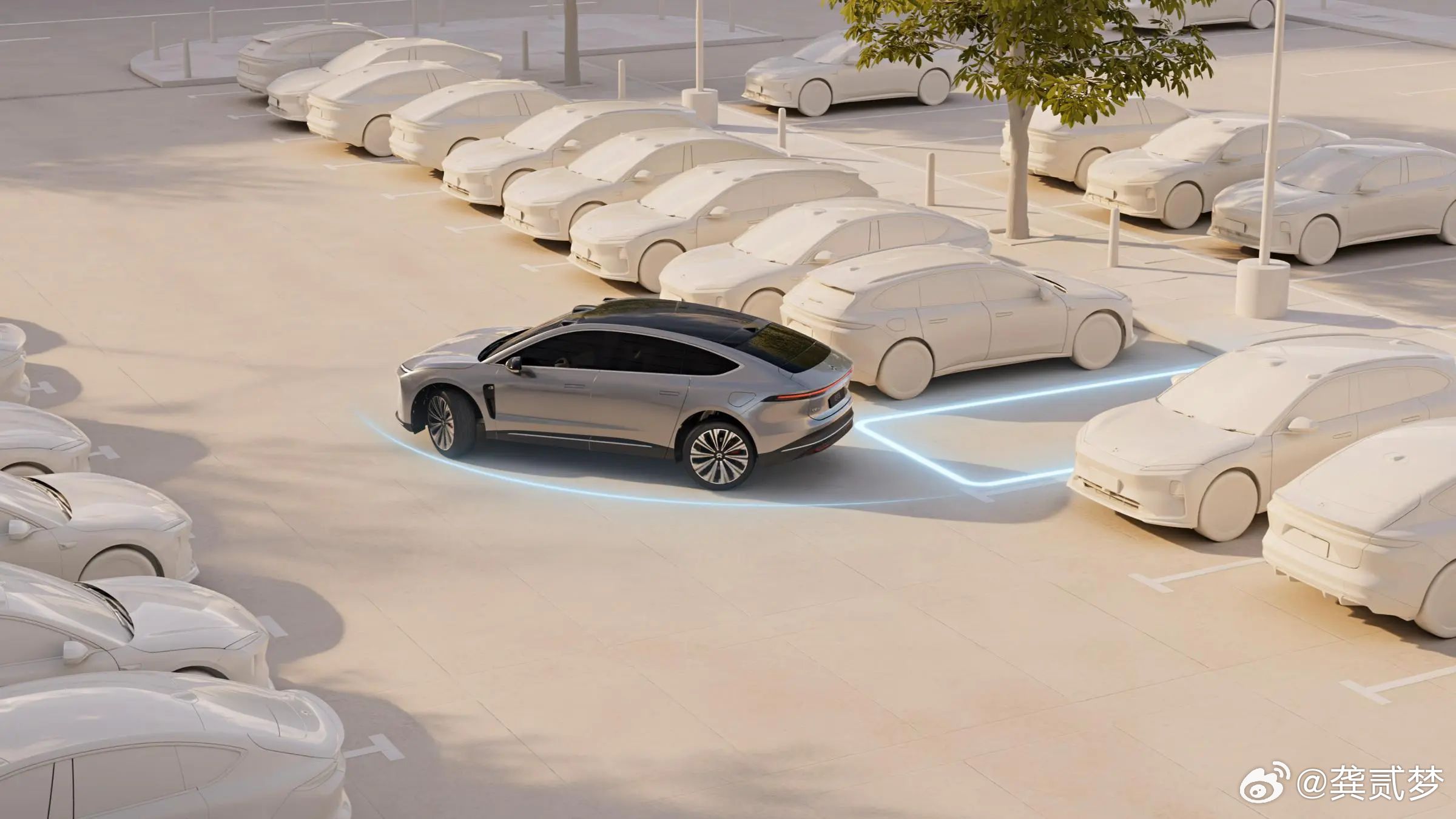
在「蔚来世界模型 NWM」中,泊车现在可以将行车的7个800万像素摄像头都调用起来,不仅看得更多更高,而且还更精准了,基本可以实现360°全向车位识别,甚至是“隔着立柱的、跨通道的车位”,这个识别广度我印象中蔚来好像是第一家。
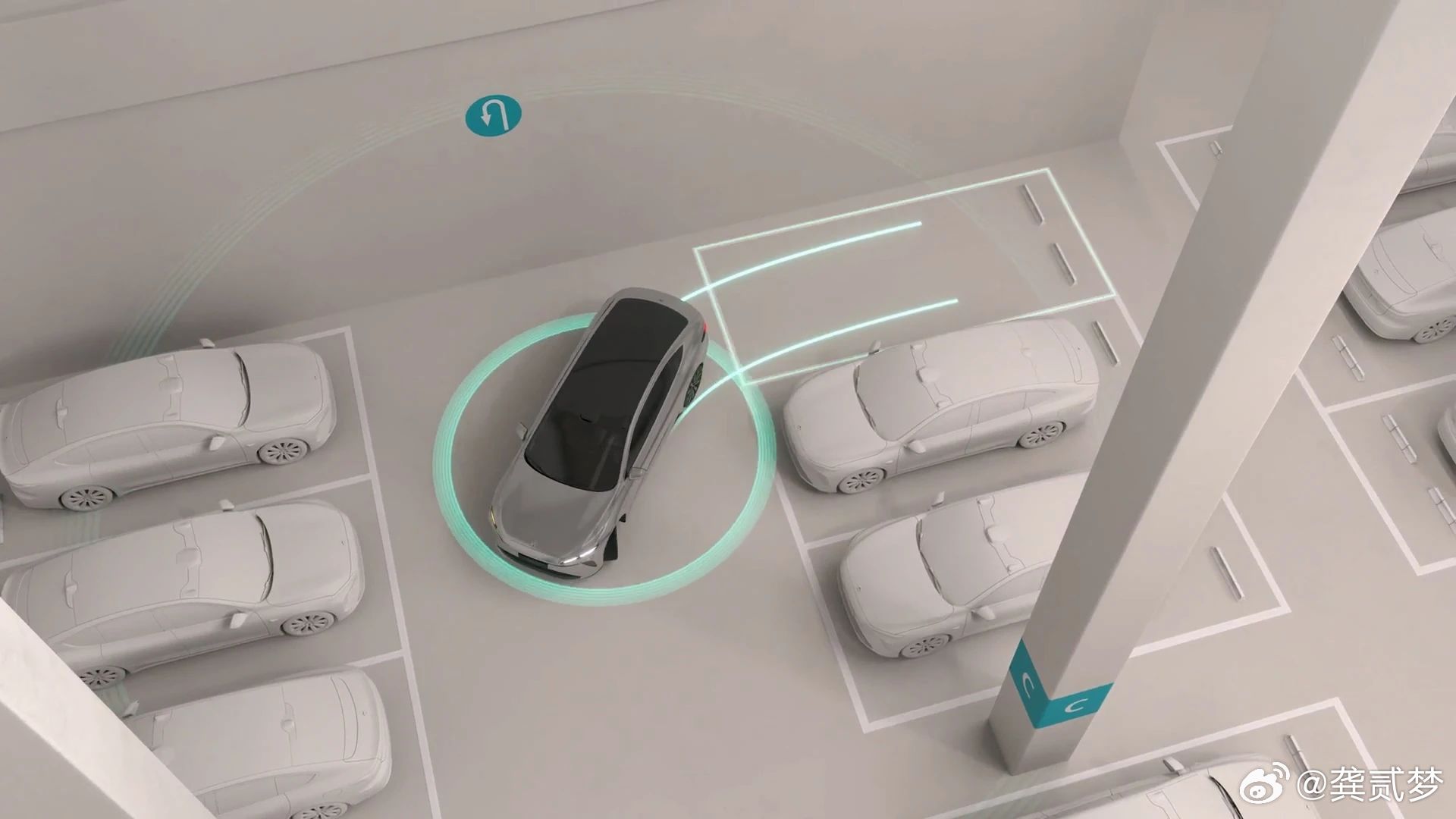
而且世界模型最大的一个特点,是可以对现实更加细微的数据做出实时规划,简单举个例子——在泊车过程中,即使有人突然往后方放了个桩桶,NWM智能泊车也能即时计算,重新规划泊车路线。
这一点很重要,因为我不追求停得一定要有多快,我需要的是省心安全,在遇到可能发生的危险是,蔚来就能立刻规划出一条全新的路线,降低即将发生的危险性。
“解放精力、减少事故”,这是蔚来整个智能驾驶辅助体系的核心要义。
简单点来说,神玑NX9031也不是白干的,现在可以说的是无论是识别能力还是泊车效率上都提升不少,具体能力表现大家可以等一波推送。
对了,这次没有领航团,直接全量推送。
蔚来大v聊车