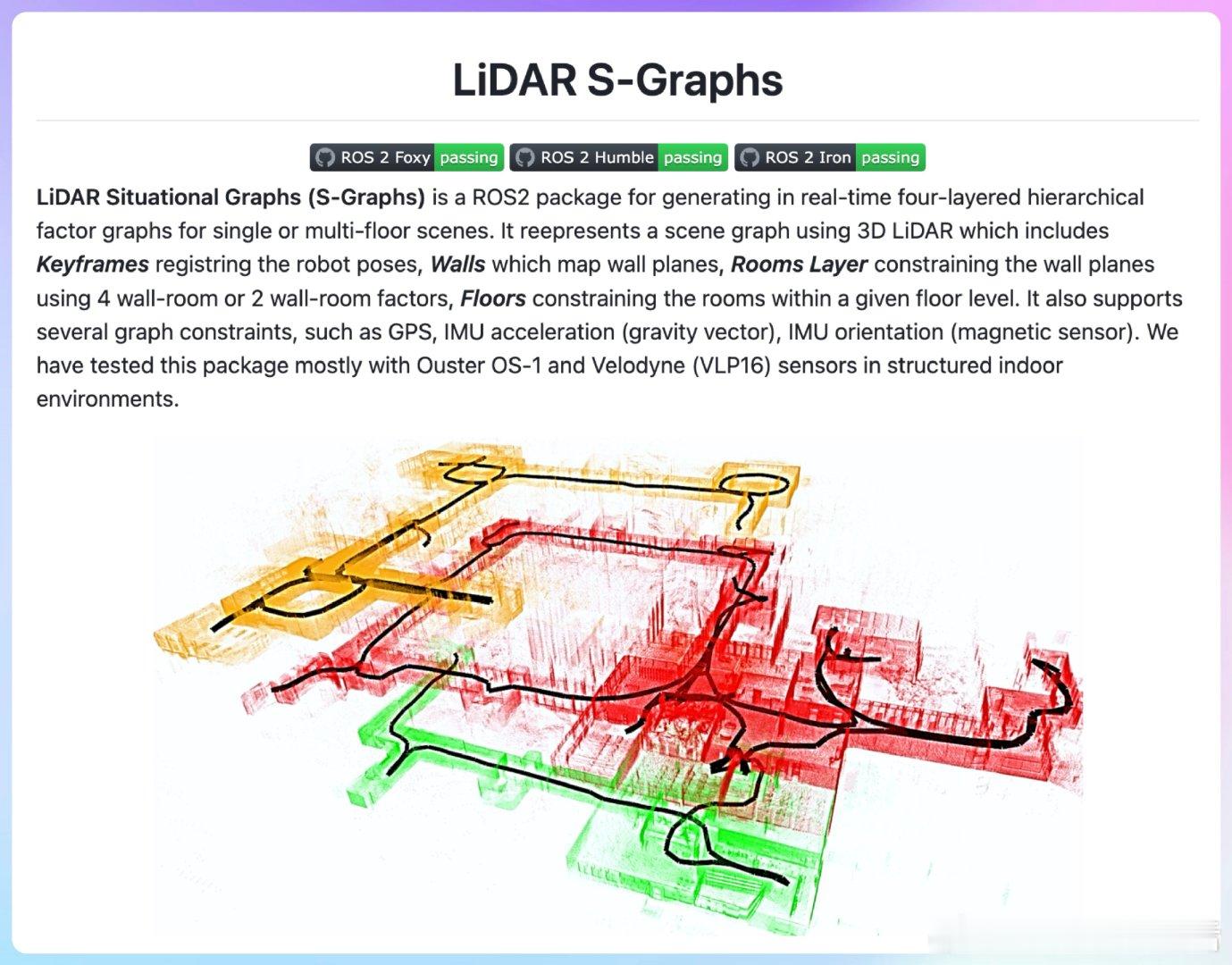
【[239星]lidar_situational_graphs:实时生成机器人姿态和地图优化的三维激光雷达情境图(S-Graphs)。亮点:1. 实时生成四层层次化因子图,优化机器人导航效率;2. 支持多楼层场景,适应复杂室内环境;3. 集成多种传感器约束,如GPS、IMU,提升定位精度】
'LiDAR Situational Graphs (S-Graphs) is a ROS2 package for generating in real-time four-layered hierarchical factor graphs for single or multi-floor scenes.'
GitHub: github.com/snt-arg/lidar_situational_graphs